
Modelo de velocidad 3D con geología compleja y vacíos para la localización y el mecanismo microsísmico


Modelo de velocidad 3D con geología compleja y vacíos
para localización y mecanismo microsísmicos
Deep Mining 2014 - M Hudyma and Y Potvin (eds)© 2014 Australian Centre for Geomechanics, Perth, ISBN 978-0-9870937-9-0
DS Collins ESG Solutions, Canadá
Y Toya ESG Solutions, Canadá
I Pinnock ESG Solutions, Canadá
V Shumila ESG Solutions, CanadáZ Hosseini ESG Solutions, Canadá
Resumen
Un sistema de vigilancia microsísmica proporciona una ventana vital en una masa rocosa para ver dónde se está produciendo la fractura inducida por la tensión en relación con las operaciones mineras. Uno de los principales factores que influyen en la precisión de las localizaciones microsísmicas es el modelo de velocidad asumido para el macizo rocoso. La mayoría de las minas que utilizan sistemas microsísmicos utilizan un único modelo de velocidad para la localización que asume las mismas propiedades de módulo elástico en todo el volumen. Este estudio muestra ejemplos de localizaciones de eventos que se calcularon utilizando un modelo de velocidad que tiene en cuenta múltiples unidades geológicas de formas complejas, cada una con sus propias propiedades. El método permite añadir múltiples huecos que pueden estar rellenos de aire, de salmuera o de pasta de cemento, imitando así las operaciones mineras y geotécnicas, como la explotación de pozos, la explotación de cuevas, la explotación de soluciones o el almacenamiento subterráneo en cavernas. Con una buena calidad de datos, cada evento localizado puede resolverse para el mecanismo de origen (tensor de momento) e interpretarse en términos de si el evento es dominantemente de apertura por tracción, cierre o deslizamiento por cizalla. La orientación de cada zona fallada puede cuantificarse proporcionando información útil sobre la red de fractura discreta (DFN). Este artículo proporciona ejemplos de soluciones de mecanismos fuente utilizando un modelo de velocidad 3D completo. Se demuestra que la trayectoria del rayo de cada sensor afecta a la solución del mecanismo de la fuente cuando se compara una solución de modelo de velocidad única y una solución de modelo de velocidad 3D. La mejora de la precisión de los resultados sísmicos mediante el uso de métodos de procesamiento mejorados y la calibración periódica permite a una mina integrar con mayor confianza los resultados sísmicos con modelos numéricos y tomar decisiones. Esto es especialmente importante a medida que las minas pasan a métodos de excavación diferentes, como la espeleología de bloques, y se extienden a mayores profundidades y tensiones.
1. Introducción
Muchas aplicaciones mineras de todo el mundo están utilizando la monitorización microsísmica como herramienta esencial para escuchar la forma en que una masa rocosa responde a los cambios de tensión y proporcionar una notificación inmediata de comportamientos anómalos, como eventos de gran magnitud o grupos de eventos (Alexander y Trifu 2005; Hudyma et al. 2010; Wu et al. 2012). El análisis sísmico forense a los pocos días de producirse una actividad anómala, o incluso meses después, puede proporcionar una evaluación importante de las tendencias de los parámetros de origen, así como de la mecánica del fallo con respecto a las excavaciones y fallas de las minas (Trifu et al. 2007; Collins et al. 2013, 2014). Recientemente, la microsísmica está desempeñando un papel esencial en aplicaciones como la monitorización de la fracturación hidráulica del gas de esquisto y las cavernas de almacenamiento subterráneo (Baig et al. 2012). Ser capaz de monitorizar en tiempo real un volumen 3D de roca a gran profundidad bajo el suelo es muy importante para rastrear cualquier fractura y coalescencia de roca que pueda estar produciéndose.
2. Control microsísmico
Los sistemas microsísmicos de las minas han cambiado considerablemente en los últimos 25 años. Los sistemas modernos pueden digitalizar más de 100 eventos por minuto y proporcionar una alerta sísmica de actividad anormal al minuto de producirse. Los sistemas son modulares, con sensores y unidades de digitalización situados bajo tierra para obtener una alta calidad de la señal respecto al ruido. Los datos digitalizados continuos con sincronización horaria GPS se transmiten a través de una red de fibra óptica a un ordenador de superficie, donde se guardan en un gran disco duro ringbuffer, junto con los datos de los eventos activados. La unidad ringbuffer permite a los operadores de la mina retroceder varias semanas e investigar los eventos sísmicos utilizando una configuración de disparo más sensible en las zonas de interés. La figura 1 es un dibujo esquemático de una mina de ejemplo vigilada con sensores de superficie y subterráneos. Los operadores formados de la oficina de ingeniería pueden utilizar software de visualización en 3D para representar la mina y los resultados sísmicos con el fin de tomar decisiones informadas sobre el funcionamiento y la seguridad de la mina.
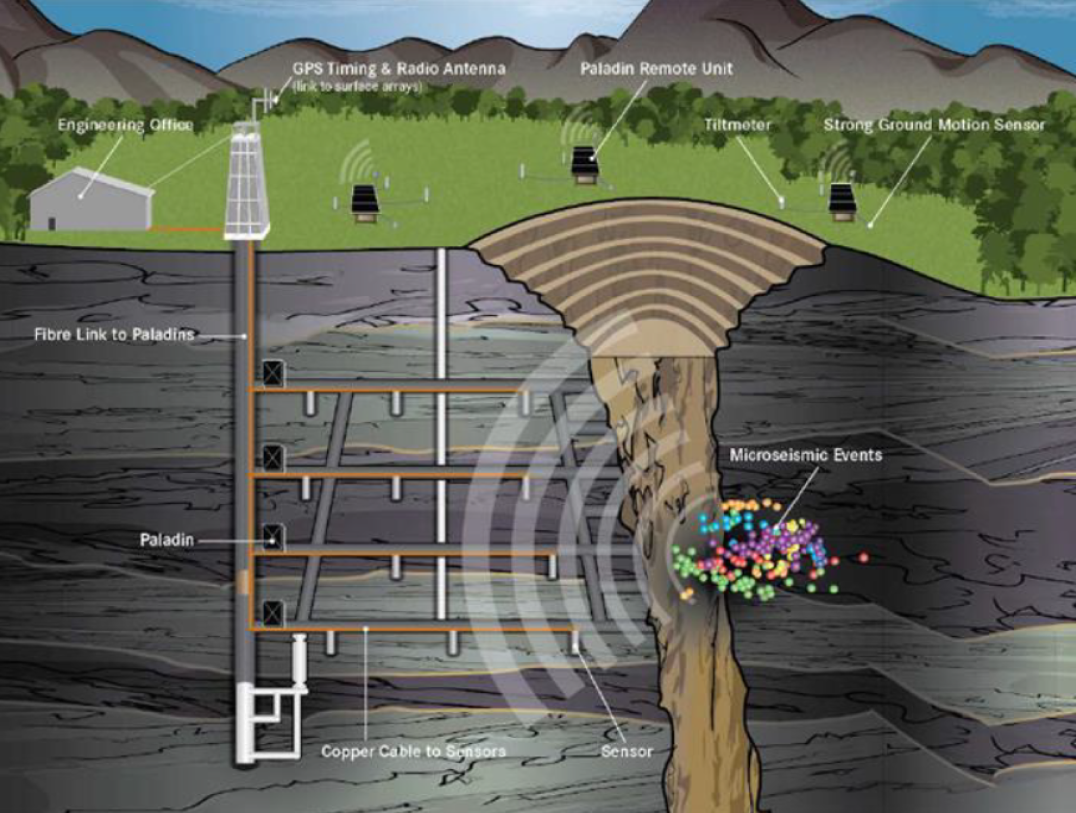
Fig. 1. Ejemplo de configuración de un sistema microsísmico típico. La energía de los eventos microsísmicos se registra en sensores instalados bajo tierra y en la superficie. Los datos en red se reciben en una oficina central de ingeniería para su procesamiento en tiempo real y la visualización de los resultados
Many hard rock mines have a sensor array that allows them to record microseismic events down to moment magnitude (MW) of -3 (source dimension about 1 m). Piezoelectric accelerometer type sensors are generally needed to record to this small magnitude size. Fifteen Hz geophone type sensors can record microseismic events down to about MW = -2.0. For weak or soft rock mines, it is recommended to use 15 Hz geophones since the energy from events MW<-2.0 will be strongly attenuated, making the use of accelerometers not ideal unless they are very closely spaced. 4.5 Hz geophone type sensors, also known as strong ground motion (SGM), are generally used to record events MW>0.0. Figure 2 is a schematic figure showing the recommended magnitude range for the three sensor types discussed. A combination of theSeismicityDeep Mining 2014, Sudbury, Canada 683three sensor types can result in the magnitude range -3.0<MW<3.0 being covered in specific regions of the rock mass. SGM sensors can detect and locate events with MW>3.0, but will generally slightly underestimate the true magnitude. Lower frequency range sensors, such as a 1 Hz geophone, can be used to complement a sensor array if very large magnitude events are expected.
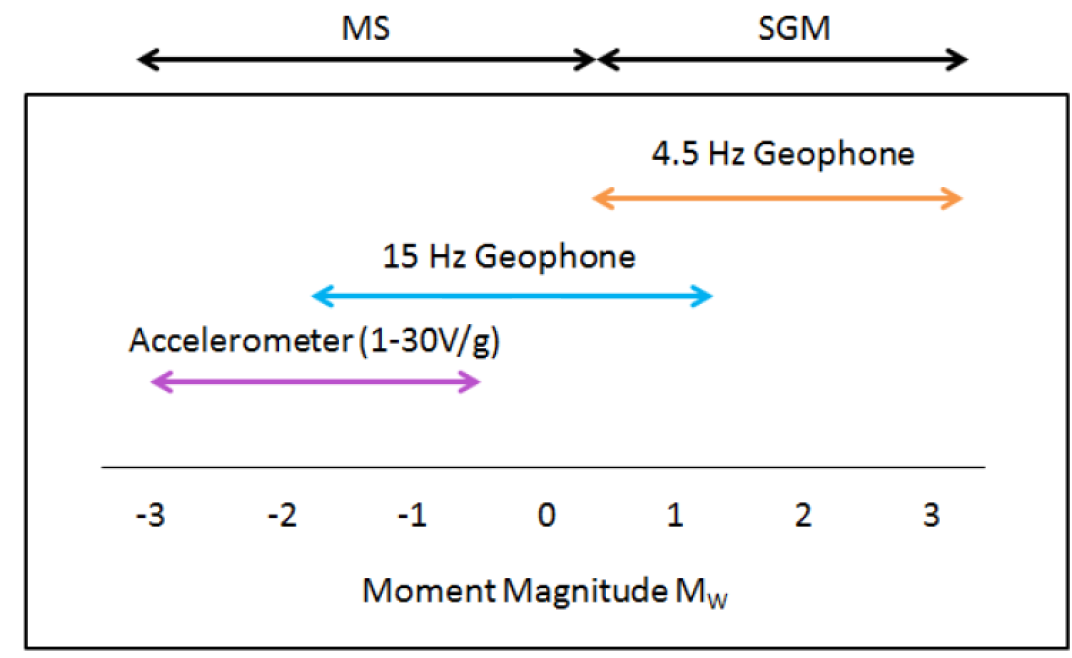
Fig. 2. Gráfico que muestra la gama de magnitudes recomendada para calcular con precisión los parámetros de la fuente a partir de distintos tipos de sensores. Una mezcla de los tres tipos de sensores mostrados puede permitir que un sistema sea sensible a un rango de magnitud de seis órdenes. El sensor de frecuencia más baja se denomina SGM mientras que los otros dos tipos de sensor se denominan microsísmicos (MS)
Una distribución tridimensional de sensores es una configuración ideal y, por lo general, conducirá a la mayor precisión en la localización de fuentes y parámetros. Una distribución 2D (plana) o 1D (lineal) de sensores también puede utilizarse como matriz microsísmica y proporcionar resultados de buena calidad. Los arrays de sensores 2D se utilizan habitualmente en determinados tipos de minas, como las minas de carbón y las minas de sal. En el caso de matrices de sensores 2D o 1D, es importante tener instalados algunos sensores triaxiales para evitar la no unicidad en la solución de localización. La Figura 3 muestra como dos posibles localizaciones, identificadas como 1 y 2 por encima y por debajo del plano, pueden ocurrir cuando se usa un array subplanar de sensores uniaxiales. El uso de una matriz mixta de sensores uniaxiales y triaxiales conducirá a una solución única (identificada como localización 3). Esto se debe a que los sensores triaxiales pueden proporcionar información sobre el tiempo de llegada y la dirección de las ondas P, en comparación con los sensores uniaxiales, que sólo proporcionan los tiempos de llegada.
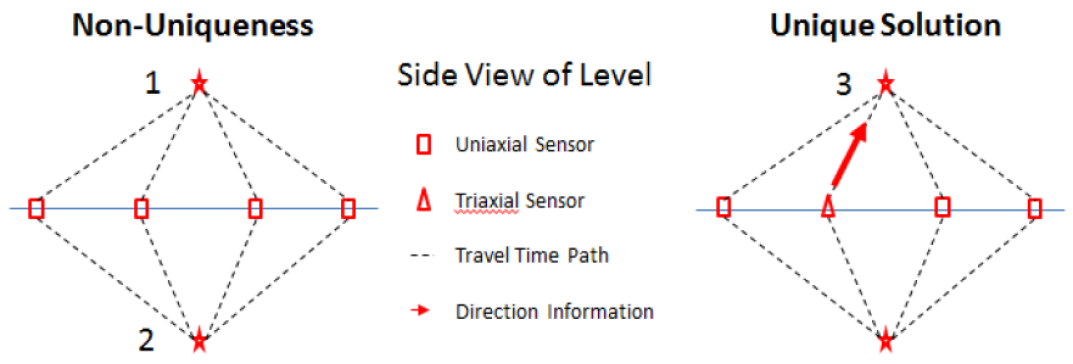
Fig. 3. Esquema que muestra la importancia de los sensores uniaxiales y triaxiales en un conjunto subterráneo plano. Existen dos posibles soluciones de localización (estrellas identificadas como 1 y 2) cuando se localiza con sensores uniaxiales. La adición de un sensor triaxial estratégicamente en el conjunto identifica la ubicación correcta (estrella identificada como 3)
3. Modelo de velocidad de la masa rocosa
La precisión de las localizaciones sísmicas y de los parámetros de las fuentes se ve afectada significativamente por el modelo de velocidad (VM) asignado a la masa rocosa. Una hipótesis sencilla consiste en utilizar un único MV (por ejemplo, isótropo, homogéneo) y utilizar fuentes de localización conocidas (por ejemplo, explosiones o impactos significativos) para determinar el mejor valor de velocidad único y cuantificar la precisión absoluta de la localización. Un tipo de MV más complejo implica múltiples capas paralelas con o sin anisotropía. El tipo de VM más complejo es el que permite múltiples formas 3D y vacíos. Este artículo se basa en los trabajos de Trifu y Shumila (2010) y Collins et al. (2014) que desarrollan algoritmos de localización que pueden utilizar MV 3D que tienen en cuenta formas geológicas complejas y vacíos. Collins et al. (2014) muestran una mejora del 87 % en la precisión de la localización al tener en cuenta los rebajes de la mina en la localización sísmica en una mina de roca dura.
3.1 Localizaciones sísmicas del estudio de caso uno
El primer estudio de caso es una caverna subterránea de Norteamérica que se vigila mediante una combinación de sensores microsísmicos uniaxiales y triaxiales instalados en cuatro perforaciones verticales (figura 4). A partir de los registros sónicos de las cuatro perforaciones, se identificaron seis capas principales. Se desarrolló un VM 3D que utilizaba las seis capas horizontales, así como la forma 3D de la caverna. Los datos de las pruebas de caída en superficie registrados en los sensores se utilizaron para optimizar los valores de velocidad de cada una de las seis capas. A la caverna llena de salmuera se le asignó una velocidad de onda P de 1.615 m/s.La figura 5 muestra un plano de corte norte-sur a través de uno de los pozos de los sensores y la caverna. Las isolíneas de tiempo (isocronas) se muestran desde el punto basado en el VM 3D utilizado en el análisis. Como era de esperar, se observa que las isolíneas varían al pasar entre los límites de las capas horizontales y también como resultado de la zona de cavernas de baja velocidad. La estrella muestra un ejemplo de localización de un evento sísmico. La línea curva negra que conecta la estrella con el punto es la trayectoria que se espera que siga la energía sísmica más rápida. Se observa que rodea la caverna en lugar de atravesarla parcialmente si se hubiera utilizado una VM más simple (hipótesis de trayectoria de rayo recto).
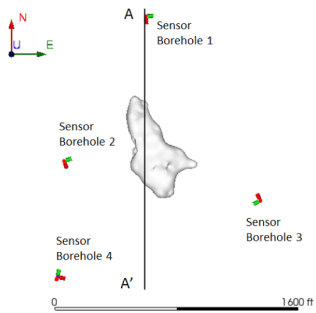
Fig. 4. Vista en planta del estudio de caso uno mostrando la caverna subterránea (superficie gris) y los sensores microsísmicos. La línea A-A' identifica una sección vertical mostrada en la Figura 5
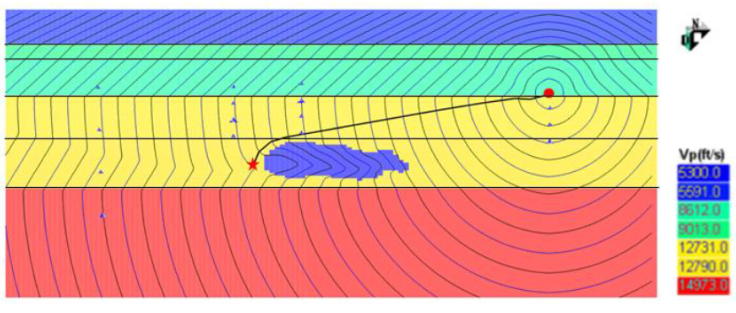
Fig. 5. La MV 3D consta de seis capas horizontales (las seis unidades geológicas principales) y la caverna llena de salmuera. La imagen muestra isolíneas temporales desde el punto (tiempo cero). Se observan cambios significativos en las isolíneas en los límites de las capas y dentro y alrededor de la caverna. La línea negra curva muestra la trayectoria directa (más rápida) de la energía sísmica desde el punto hasta la posición de la estrella.
3.2 Localizaciones sísmicas del estudio de caso dos
El caso práctico dos es una mina de cueva de bloques en un macizo rocoso de resistencia moderada en Norteamérica. El VM 3D desarrollado consta de cinco unidades geológicas irregulares en 3D con límites subverticales. Además, el volumen de la cueva de bloques se incorporó como un vacío lleno de aire. La figura 6 es una imagen de un evento sísmico (círculo relleno) localizado utilizando la MV 3D. Una mezcla de sensores microsísmicos uniaxiales y triaxiales se muestra como símbolos negros y se muestra el vacío de la cueva. Las líneas curvas desde el evento hasta cada sensor muestran la trayectoria de la energía sísmica rápida utilizando la VM 3D. Como era de esperar, la curvatura de los rayos se produce en los límites de las unidades geológicas, así como una curvatura significativa de los rayos alrededor del vacío. En las etapas regulares de crecimiento de la cueva, se actualiza la 3D VM.
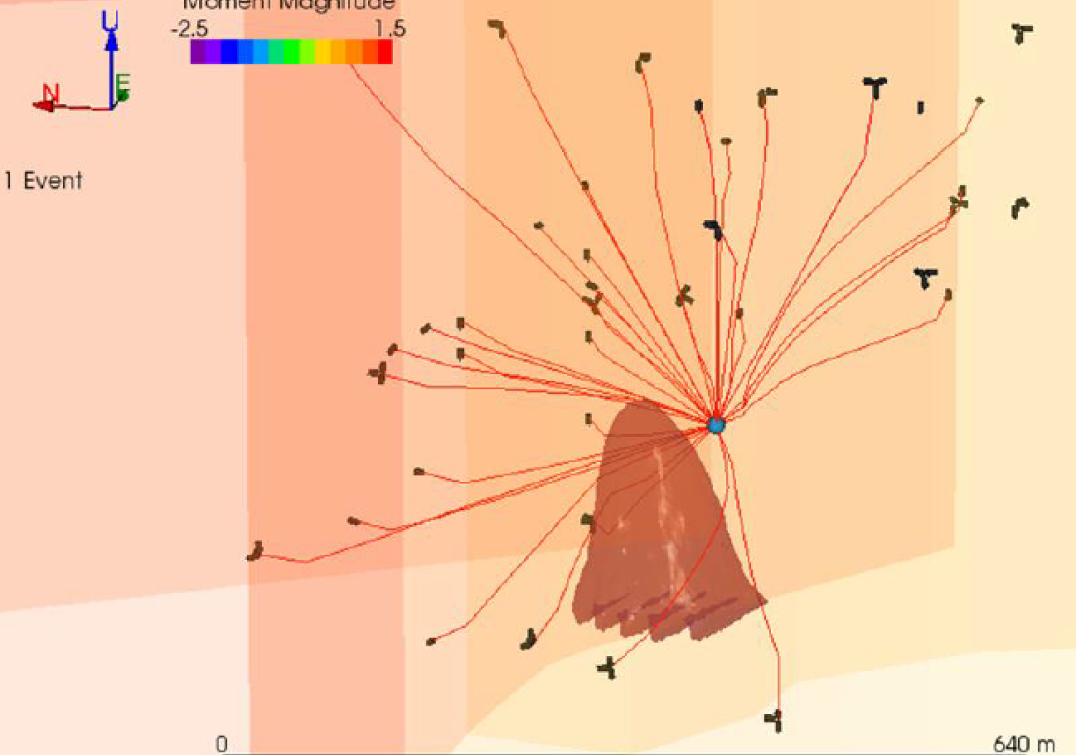
Fig. 6. Un evento sísmico (círculo relleno) localizado cerca del vacío de una cueva subterránea. Los sensores sísmicos son los símbolos negros. Las líneas son las trayectorias directas (más rápidas) de la energía sísmica desde el evento hasta los sensores, teniendo en cuenta el vacío de la cueva y las cinco unidades geológicas del lugar. Se observa una curvatura significativa de los rayos alrededor del vacío de la cueva
3.3 Mecanismos sísmicos del estudio de caso dos
El análisis del mecanismo sísmico en las minas generalmente implica el cálculo del tensor de momento (MT) sin ninguna suposición a priori sobre el tipo de mecanismo (Trifu & Shumila 2002; Collins et al. 2002). Esto permite que sean posibles todos los tipos de fallo, como el deslizamiento por cizallamiento, la apertura por tracción o el cierre de grietas. El método utilizado aquí es la inversión del tensor de momento sísmico (SMTI) y ha sido desarrollado para utilizar un VM 3D. SMTI requiere la dirección de la energía sísmica a cada sensor, y también una corrección de distancia a la amplitud de cada sensor. El uso de un VM 3D calibrado proporcionará una información de entrada más precisa (dirección y amplitud de la energía) que un VM más simple.La figura 7 muestra la solución MT para un evento del caso de estudio dos invertido usando un VM simple y un VM 3D. Los resultados se muestran en una proyección estereoscópica del hemisferio inferior con el centro representando la vertical desde la fuente y los lados del hemisferio representando las orientaciones horizontales desde la fuente sísmica. Se observa que los puntos de datos (círculos rellenos) varían hasta 10° en su ubicación en el hemisferio entre la VM simple y la VM 3D. Esto se debe a las diferencias en las trayectorias de energía entre el evento y los sensores para los distintos modelos de velocidad. Esta diferencia afectará a la solución final del mecanismo. En la Figura 7(a), se suponen trayectorias de rayos rectas, y en la Figura 7(b) pueden producirse trayectorias de rayos variables alrededor de las voces y a través de diferentes unidades geológicas. Pueden producirse variaciones más significativas cuando los eventos sísmicos se localizan muy cerca de cavernas o vacíos subterráneos.
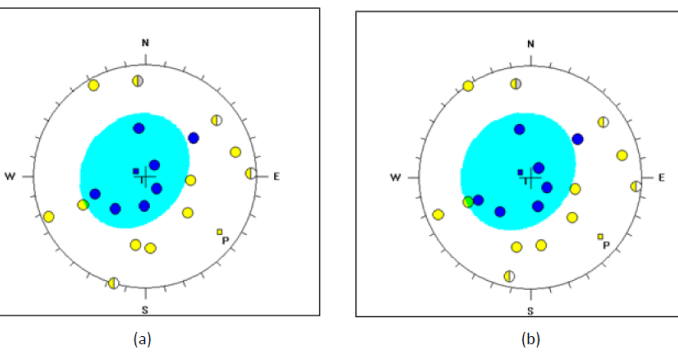
Fig. 7. Soluciones del mecanismo de la fuente (tensor de momento) para el mismo evento calculado usando (a) un modelo de velocidad simple; y (b) un modelo de velocidad 3D. Los círculos rellenos representan puntos de datos de sensores con primer movimiento de onda P positivo (relleno oscuro) y negativo (relleno claro), respectivamente. Los resultados se presentan en una proyección estereoscópica del hemisferio inferior. Las ubicaciones de los puntos de datos difieren en hasta 10° al comparar (a) y (b)
En la figura 8 se muestra un grupo de 20 eventos microsísmicos del estudio de caso dos. En (a) los eventos se muestran como puntos del mismo tamaño en relación con el vacío de la cueva (objeto debajo de los eventos). En (b) los eventos se muestran con sus soluciones del mecanismo SMTI en una representación de pelota de playa. Para cada suceso, las regiones oscuras representan la deformación hacia el exterior y las regiones blancas la deformación hacia el interior. La mayoría de los eventos de mayor elevación tienen un mecanismo de deslizamiento de cizalla dominante mientras que los eventos de menor elevación tienen un mecanismo de tipo apertura dominante. En (c) cada evento se muestra como un tensor de deformación 3D con la deformación hacia fuera mostrada como flechas dipolares orientadas hacia fuera y la deformación hacia dentro mostrada como flechas dipolares orientadas hacia dentro. Basándose en Trifu y Shumila (2011), se determinó un tensor de tensión a partir de los resultados del mecanismo de agrupación de fuentes. Este método de tensor de tensión sísmica puede utilizar cualquier tipo de mecanismo de fuente y fue desarrollado para aplicaciones mineras. Es una mejora del método de Gephart y Forsyth (1984), que se desarrolló para estudios de terremotos y asume el fallo por deslizamiento cortante. En la Figura 8(d), los resultados del mecanismo se muestran como fracturas circulares escaladas a su radio de fuente calculado. Para los mecanismos de eventos que son dominantemente de deslizamiento por cizallamiento (más del 50% de cizallamiento en MT), el tensor de tensión determinado para el cluster se ha utilizado para resolver cuál de los dos posibles planos de deslizamiento por cizallamiento es más probable que se haya deslizado. Para el resto de sucesos, se supone que el plano de fractura mostrado es perpendicular a la dirección de apertura o cierre (mayor deformación hacia dentro o hacia fuera). El grupo de fracturas mostrado se considera un DFN. La visualización de los resultados del mecanismo de la fuente como un DFN ofrece información adicional sobre la fracturación que se produce en la masa rocosa en relación con los huecos de la mina, y ayuda a que la interpretación sísmica vaya más allá de los puntos.
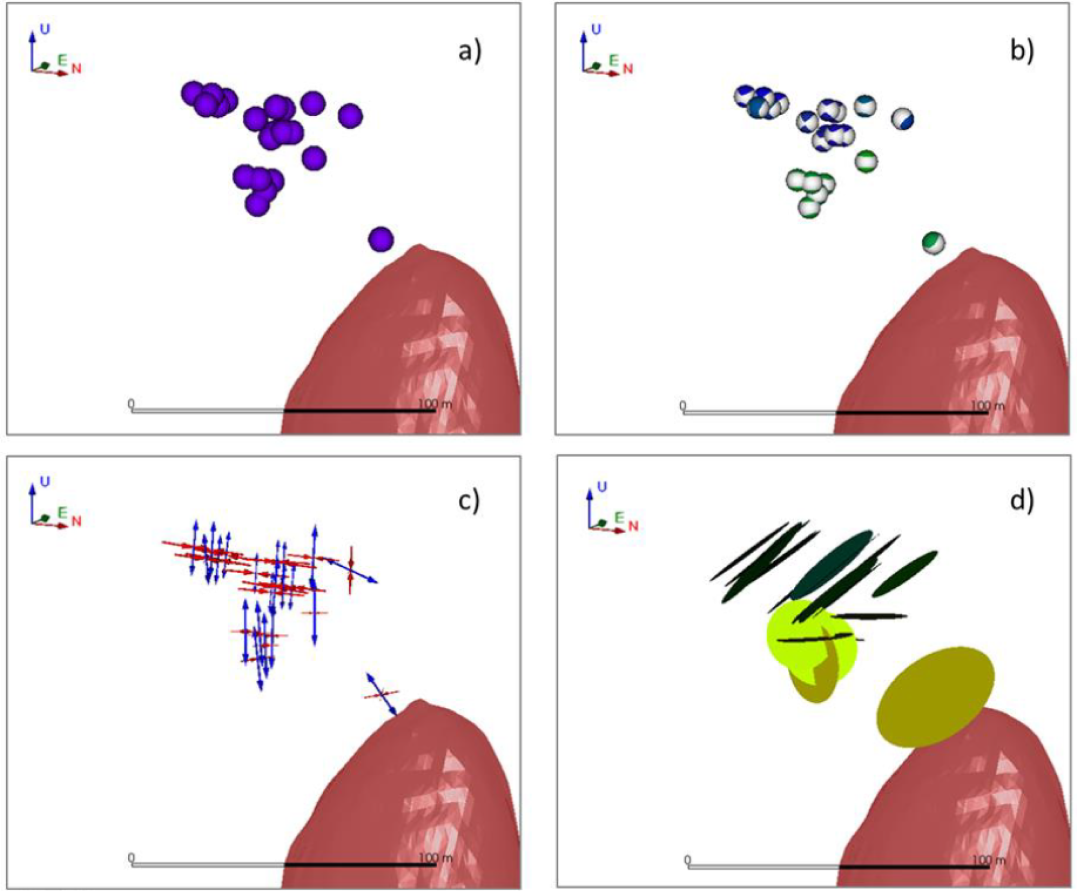
Fig. 8. Eventos sísmicos ocurridos cerca de un vacío (gran superficie sombreada en la parte inferior derecha) en el estudio de caso dos. En (a), los eventos se muestran como puntos encontrados utilizando un VM 3D. En (b), las soluciones del mecanismo de la fuente se muestran como una pelota de playa. En (c), las soluciones del mecanismo fuente se muestran como un tensor de deformación, y en (d) las soluciones se muestran como fracturas discretas dimensionadas según su dimensión fuente. Para más detalles, véase el texto
4. Conclusión
Este artículo presenta los resultados de dos estudios de caso realizados en Norteamérica. En el primer caso, el uso de un MV 3D con seis capas horizontales y la forma 3D de la caverna llena de salmuera permite resolver con mayor precisión los eventos microsísmicos, especialmente los que se producen cerca de los límites de la caverna. En el estudio de caso dos, se desarrolló una VM 3D que tiene en cuenta cinco unidades geológicas 3D de forma irregular, así como un vacío en la caverna, y se utilizó para determinar las ubicaciones de las fuentes y los mecanismos de un grupo de 20 eventos. Como era de esperar, el uso de una VM 3D afecta a la solución del mecanismo de origen en comparación con el uso de una única VM. Los resultados del mecanismo de la fuente se muestran de tres formas diferentes (balones de playa, tensor de deformación y DFN), siendo esta última la que implica el uso de la inversión del tensor de tensión sísmica. Se espera que el uso del análisis del mecanismo de la fuente pueda generalizarse en el análisis sísmico para ayudar a comprender la mecánica del fallo asociada a las localizaciones de las fracturas de la roca.
Referencias
Alexander, J, Trifu, CI 2005, 'Monitoring mine seismicity in Canada', en Y Potvin y M Hudyma (eds), Proceedings of the Sixth International Symposium on Rockburst and Seismicity in Mines: RaSiM6, Australian Centre for Geomechanics, Perth, pp. 353-358.
Baig, A, Urbancic, T & Wuesterfeld, A 2012, 'Variability of hydraulic fractures in shale or tight gas reservoirs', en RF Broadhead (ed.). Proceedings of the Tenth Middle East Geosciences.
Conference, American Association of Petroleum Geologists, Tulsa, Article #90141.
Collins, DS, Pettitt, WS & Young, RP 2002, 'High resolution mechanics of a microearthquake sequence', Pure Applied Geophysics, vol. 159, pp. 197-219.
Collins, DS, Pinnock, I, Toya, Y, Shumila, V & Trifu, CI 2014, 'Seismic event location and source mechanism accounting for complex block geology and voids', in P Smeallie & J Roberts (eds), Proceedings of the 48th ARMA US Rock Mechanics/Geomechanics Symposium, American Rock Mechanics Association, Alexandria, paper 14-7530.
Collins, DS, Pinnock, I, Shumila, V, Trifu, CI, Kamp, C, Davies, A & Chan, A 2013, 'Optimizing microseismic source event location by applying a variable velocity model to a complex geological and mining setting at the New Gold New Afton Block Cave', en FP Hassani (ed.), Proceedings of the 23rd World Mining Congress on Advances in Mining Engineering, Canadian Institute of Mining, Metallurgy and Petroleum, Westmount, PDF paper 674.
Gephart, JW & Forsyth, DW 1984, 'An improved method for determining the regional stress tensor using earthquake focal mechanism data: application to the San Fernando earthquake sequence', Journal of Geophysical Research, vol. II. 89, pp. 9305-9320.
Hudyma, MR, Frenette, P & Leslie, I 2010, 'Monitoring open stope caving at Goldex Mine', Proceedings of the Second International Symposium on Block and Sublevel Caving, Australian Centre for Geomechanics, Perth, pp. 133-144.
Trifu, CI & Shumila, V 2002, 'The use of uniaxial recordings in moment tensor inversions for induced seismic sources', Tectonophysics, vol. 356, pp. 171-180.
Trifu, CI & Shumila, V 2011, 'The analysis of stress tensor determined from seismic moment tensor solutions at Goldex Mine Quebec', in P Smeallie & J Roberts (eds), Proceedings of the 45th ARMA US Rock Mechanics Symposium, American Rock Mechanics Association, Alexandria, paper 11-584.
Trifu, CI & Shumila, V 2010, 'Geometrical and inhomogeneous raypath effects on the characterization of open pit seismicity', in P Smeallie & J Roberts (eds), Proceedings of the 44th ARMA US Rock Mechanics Symposium, American Rock Mechanics Association, Alexandria, paper 10-406.
Trifu, CI, Shumila, V & Burgio, N 2007, 'Characterization of the caving front at Ridgeway Mine, New South Wales, based on geomechanical data and detailed microseismic analysis', en Y Potvin, J Hadjigeorgiou & TR Stacey (eds), in Challenges in Deep and High Stress Mining, Australian Centre for Geomechanics, Perth, pp. 445-453.
Wu, X, Liu, C, Hosseini, Z & Trifu, CI 2012, "Applications of microseismic monitoring in Chinas underground coal mines", en TM Barczak (ed.), Proceedings of the 31st International Conference on Ground Control in Mining, pp. 130-137, publicado por International Conference on Ground Control in Mining, West Virginia.